Aircraft Vision Systems

LASER-based Sense and Avoid System
The nightly news is abuzz with talk of “drones,” or rather Unmanned Aerial Vehicles (or UAVs). Most of the talk confuses remotely piloted (or remote control) flight with autonomous flight. Autonomy requires a system to be aware of its environment, and the relative position of the vehicle within that environment. This allows the system to act in the environment and do rudimentary things like avoid obstacles, and find places to land.
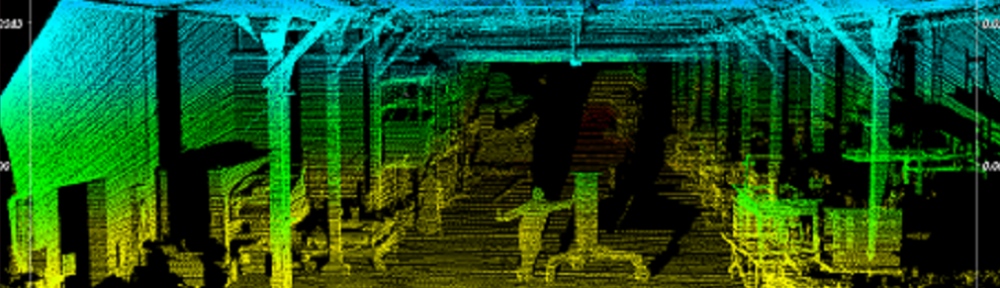
One key technology is in the area of visual sensing of the environment. I have worked on systems that enable autonomous flight by giving air vehicles the ability to “see” their environment using a scanning LADAR (LASER Detection And Ranging) system. The LADAR system scans horizontally and vertically collecting data points and range data for return values of reflected light. This information is stored in a data structure to create a computer-based 3-D view of the environment. This sensor was used to create the first fully autonomous flight of a full-sized helicopter.
Here’s a link to the Popular Science Magazine article
The sensor is based on earlier work, where we developed a simpler system to act as a landing aid. A similar LADAR scanning technique is used to find large, flat areas of ground suitable for landing a helicopter – this is generally referred to as 2.5D.
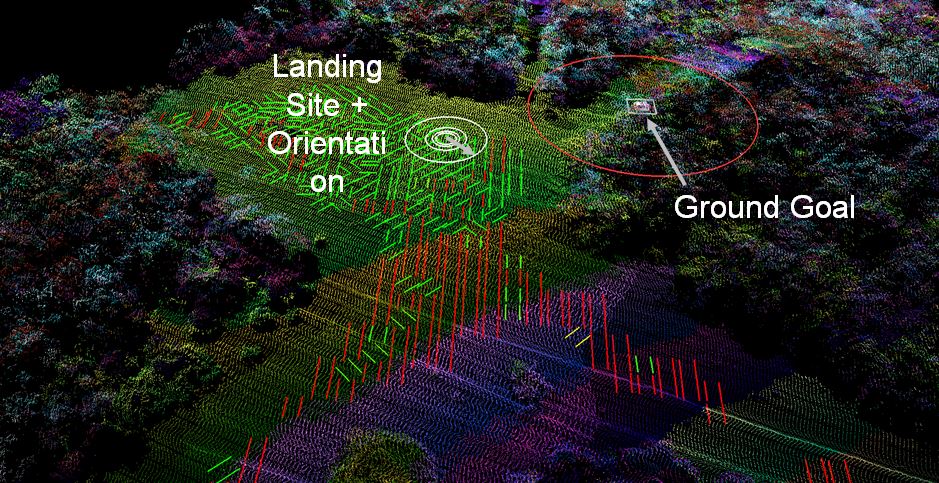
Landing Zone Selection Aid Finds Large Flat Areas in Real-Time